1) Explica qué diferencia hay entre un automatismo y un robot.
La diferencia entre un automatismo y un robot es que un automatismo es el funcionamiento de un mecanismo, sistema o proceso sin agentes anteriores. Sin embargo, un robot es una máquina que puede hacer automáticamente distintas acciones a partir de unos agentes anteriores.
2) ¿Qué es un microcontrolador? ¿En qué se diferencia de un ordenador? ¿Qué
aplicaciones pueden tener los microcontroladores?
Un microcontrolador es un circuito integrado que en su interior contiene una unidad central de procesamiento, unidades de memoria, puertos de entrada y salida y periféricos.
Estas partes están interconectadas dentro del microcontrolador, y en conjunto forman lo que se le conoce como microcomputadora. Se puede decir que un microcontrolador es una microcomputadora completa encapsulada en un circuito integrado.

- 3) Enumera cinco sensores usados en robótica y explica para qué pueden servir.
- Sensor de contacto o bumper: sirve para la detección de obstáculos por contacto directo.

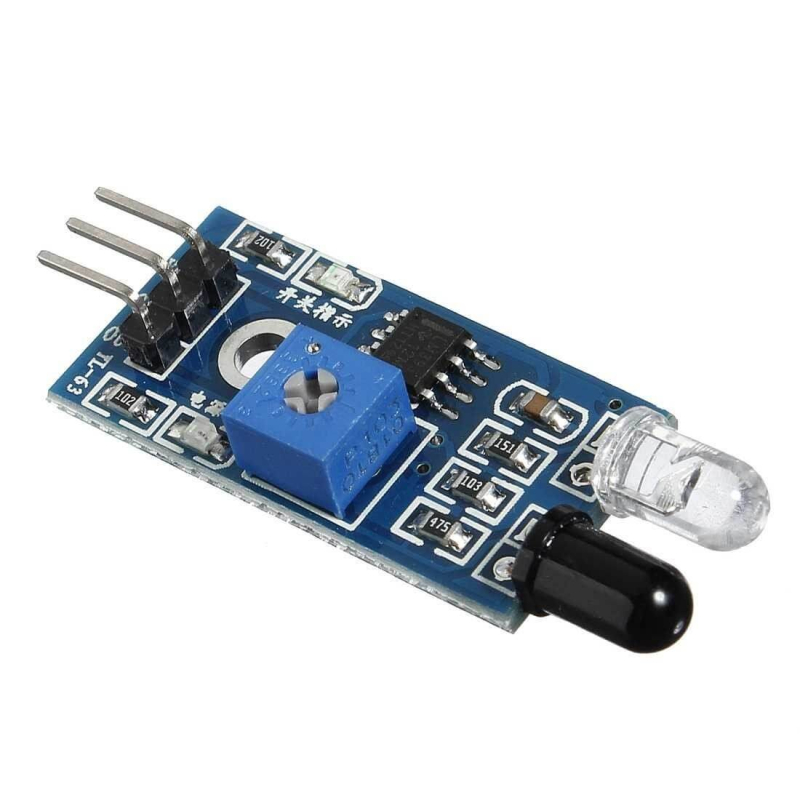
-Sensor de infrarrojos: emite luz infrarroja por medio de un led emisor de IR y dependiendo del receptor puede tener distinto funcionamiento.
-Sensor de temperatura: se usan para detección de la temperatura ambiente que tiene a su alrededor, pudiendo activar módulos refrigeradores.

-Sensor de luz: se usan para detectar niveles de luz ambiente o seguimiento de luces o linternas.

-Sensor de ultrasonidos: envia el pulso de arranque y mide la anchura del pulso de retorno.

4) Enumera cuatro actuadores usados en robótica y explica para qué pueden servir.
-Actuadores hidráulicos: funcionan sobre la base de fluidos a presión.
Existen tres grupos:
- cilindro hidráulico
- motor hidráulico
- motor hidráulico de oscilación
-Actuadores electrónicos: son muy utilizados en los aparatos mecatrónicos, como por ejemplo, en los robots.

-Actuadores neumáticos: convierten la energía del aire comprimido en trabajo mecánico.

- Actuadores eléctricos: requieren de energía eléctrica como fuente de energía. Como se utilizan cables eléctricos para transmitir electricidad y las señales, es altamente versátil y prácticamente no hay restricciones respecto a la distancia entre la fuente de energía y el actuador.

5) ¿En qué lenguajes o con qué programas se puede programar la placa de Arduino?
Para programar un Arduino, el lenguaje estándar es C++, aunque es posible programarlo en otros lenguajes.
Se puede programar con distintos programas como Scratch, MBlock, mindplus, miniblock....
6) ¿Cuántas salidas digitales tiene la placa de Arduino? ¿Qué significa que un pin digital sea pmw?
Un arduino dispone de 14 pines que pueden configurarse como entrada o salida y a los que puede conectarse cualquier dispositivo que sea capaz de transmitir o recibir señales digitales de 0 y 5 V.
Las salidas PWM (pulse with modulation) permiten generar salidas analógicas desde pines digitales.
7) ¿Qué es una señal analógica? ¿Cuántas entradas/salidas analógicas tiene la placa de Arduino?
Es un tipo de señal generada por algún tipo de fenómeno electromagnético, que es representable por una función matemática en la que su aptitud y periodo son variables en función al tiempo.
En el Arduino uno, las entradas analógicas son las correspondientes a los pines A0 a A5. Leen valores de tensión 0 a 5 voltios con una resolución de 1024 (10 bits).
Tiene 6 salidas analógica de 8bits en los pines 3, 5, 6, 9, 10 y 11.
- 8) Cuando vuelco un programa mediante el IDE de Arduino o mBlock, ¿queda grabado en la tarjeta para la próxima vez que lo conecte?
Sí que queda grabado, de ese modo se pueden añadir más programas.
- 9) Explica las diferencias que existen entre un motor de corriente continua, uno paso a paso y un servomotor.
Ventajas de los motores paso a paso:
- Mayor exactitud en la posición y repetición de los movimientos.
- Error de paso inferior al 5%.
- Perfecta respuesta en arranque y parada.
- Confiable y duradero, ya que no existe contacto de escobillas.
- Ángulo de rotación proporcional a los pulsos de entrada.
- Gran rango de velocidades de rotación, ya que responde a la frecuencia de pulsos de entrada digitales.
- Ventajas de los servomotores:
- Ahorro de tiempo en fase de elaboración de proyectos, pudiendo realizar modificaciones sin costes adicionales.
- Máxima precisión.
- Elevada torsión.
- Tamaño y coste de mantenimiento reducidos.
- Carga ligera.
- Curva de velocidad lineal, aspecto que reduce el esfuerzo computacional.
Ventajas de los motores corriente continua:
-
- El par de giro (momento torsor) de arranque es más alto que en los motores de corriente alterna y varía de forma lineal con la velocidad, además este par de giro es proporcional a la intensidad ya que a mayor intensidad, mayor flujo magnético.
- Se pueden alimentar con energía almacenada en baterías o mediante energía fotovoltaica.
- La regulación de la velocidad es sencilla y más económica que en los motores de corriente alterna.
- Se pueden usar con reductoras para multitud de aplicaciones de tal forma que consiguen tener más fuerza de giro
- Sólo llevan dos cables.
- Trabajan con tensión no peligrosa en el caso de los de 24/12Vdc
- Pueden trabajar a bajas velocidades.
-
- 10) En un coche con dos motores controlado por una placa de Arduino, ¿qué sensor crees
que sería necesario para que el coche detecte un obstáculo? Describe su funcionamiento.
- Creo que usaría el sensor ultrasonido, porque detecta el obstáculáo y activa el coche haciendo que gire y no se choque.